Langstrecken-Hinderniserkennung für Fahrerassistenzsysteme (LROD-ADAS)
On-Board-Vision-basierte Umgebungswahrnehmungslösungen für Schienenfahrzeuge, Hinderniserkennung über große Entfernungen und Zustandsabschätzung in Schienenfahrzeugen.

Die weltweite Nachfrage nach Schienentransporten steigt stetig, sowohl aufgrund des sich verändernden Verbraucherverhaltens als auch aufgrund des zunehmenden Welthandels. Der Einsatz fortschrittlicher Technologien aus dem Bereich der Robotik könnte den Betrieb dichterer Schienennetze ohne den kostspieligen und nicht nachhaltigen Bau neuer Gleise ermöglichen und gleichzeitig die Sicherheit durch eine zuverlässige Einschätzung des Fahrzeugzustands und ein bordseitiges Situationsbewusstsein erhöhen.
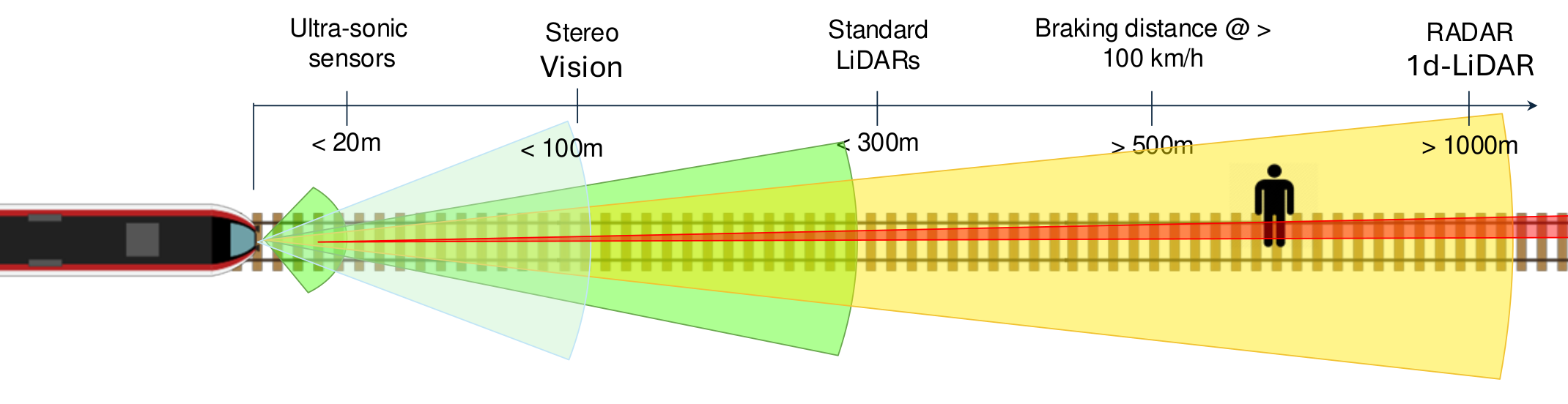
Lebensgefährliche Risiken für Menschen, Schäden an den Fahrzeugen und weitreichende Störungen des Bahnbetriebs können durch die frühzeitige Erkennung möglicher Hindernisse auf den Gleisen vermieden werden. Dies ist heute allein die Aufgabe des Lokführers, der jedoch durch sein Sichtfeld, seine persönliche Fitness sowie die aktuellen Umgebungsbedingungen wie Licht und Wetter eingeschränkt ist. Die infrastrukturseitige Videoüberwachung wird in der Nähe von Bahnhöfen oder Bahnübergängen eingesetzt, aber die Ausstattung eines gesamten Schienennetzes mit solchen Sensoren würde sehr hohe Installations- und Betriebskosten verursachen. Fahrerassistenzsysteme (ADAS) mit Objekterkennungsfunktionen könnten den Zugführer durch moderne bordeigene Sensortechnologien und datengesteuerte Objekterkennung unterstützen. Die erforderliche Reichweite für die Hinderniserkennung sollte im Optimalfall über dem individuellen Bremsweg eines Zuges liegen, der aufgrund des Gewichts, der hohen Fahrgeschwindigkeit und der geringen Bremskraft von Metallrädern auf Metallschienen oft die 500 m-Marke überschreitet. Für die Hinderniserkennung im Bereich der Autonomen Mobilen Roboter (AMR) sind bereits verschiedene Sensortechnologien im Einsatz, wie Light Detection And Ranging (LiDAR), Radarsysteme oder Stereosehen. Für den Einsatz in Schienenfahrzeugen verfügen diese jedoch nicht über eine ausreichende Erfassungsreichweite oder sind durch die besonderen Reflexionseigenschaften eines Ziels begrenzt, so dass sie für eine direkte breite Adaption ungeeignet sind.
Im Rahmen eines kürzlich abgeschlossenen Projekts der Mobilitätsinitiative untersuchten Cornelius von Einem und seine Kollegen vom Autonomous Systems Lab unter der Leitung von Professor Roland Siegward in Zusammenarbeit mit der SBB die Machbarkeit eines bordeigenen Hinderniserkennungssystems mit großer Reichweite, das in der Lage ist, alle bekannten und unbekannten Hindernisse auf den Gleisen zu erkennen und zu lokalisieren. Die Arbeit umfasste
- das Design einer neuartigen aktiven Langstreckensensorik,
- die Entwicklung eines datengesteuerten Hinderniserkennungsalgorithmus und
- eine flexible Sensorfusionsmethode zur Fahrzeugzustandsschätzung.
Die größten Herausforderungen waren die Entwicklung einer hinreichend präzisen Sensorlösung sowie die algorithmischen Herausforderungen bei der Erkennung möglicher Gefahren ohne verfügbare Trainingsdaten und die Schätzung der Zugposition für eine genaue Zuordnung von Karte und Kamera.
Hochpräzise Langstreckensensorik für Eisenbahnanwendungen
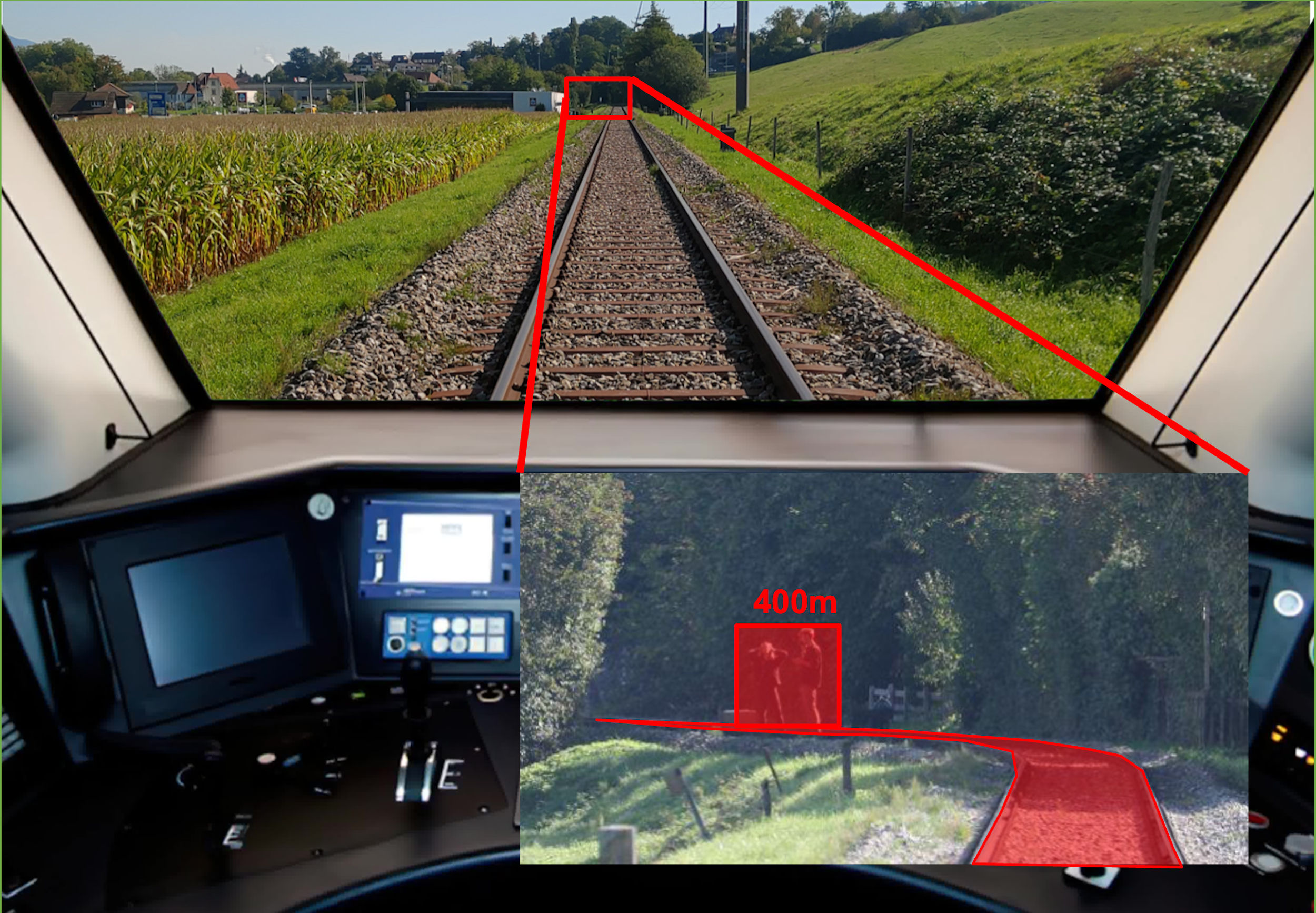
Das Team entwickelte eine hochpräzise Langstreckensensorik, bestehend aus Kameras mit hoher Brennweite, einem 1D-LiDAR für große Entfernungen und einer neuartigen, hochpräzisen und kostengünstigen Aktuatorplattform zur aktiven Ausrichtung der Sensorik auf mögliche interessante Regionen am Horizont. Unsere kundenspezifische Kardanplattform weist eine Zielgenauigkeit von weniger als 7 mdeg auf, was ausreicht, um menschengroße Hindernisse in einer Entfernung von 1500 m zu erkennen. Darüber hinaus demonstrieren wir ein eisenbahnspezifisches Kalibrierungsverfahren, das Eisenbahnschienen als georeferenziertes Kalibrierungsziel mit großer Reichweite verwendet.

Ein neuartiges Verfahren zur Erkennung von Anomalien im Eisenbahnverkehr
Das Projekt befasst sich mit der visuellen Erkennung möglicher Gefahren auf den vorausliegenden Gleisen. Herkömmliche Hinderniserkennungssysteme werden auf eine vordefinierte Menge möglicher Objekte trainiert, sind aber von vornherein auf diese Kategorien beschränkt und können nicht auf unbekannte Hindernistypen verallgemeinert werden, wie z. B. umgestürzte Bäume nach einem Sturm. Darüber hinaus ist die Menge der im Eisenbahnbereich verfügbaren Trainingsdaten stark begrenzt, was häufig zur Verwendung künstlich vergrößerter Datensätze führt, was zu unerwarteten Verzerrungen der Detektoren führt. Wir haben ein neuartiges Verfahren zur Erkennung von Anomalien im Schienenverkehr entwickelt, indem wir es als eine Aufgabe zur Segmentierung von Bahngleisen umformulierten und dabei Hindernisse aus dem Trainingsprozess ausschlossen. Durch die Analyse der Differenz zwischen der tatsächlichen Gleiserkennung und der erwarteten Gleiserkennung sind wir in der Lage, Hindernisse zuverlässig zu erkennen, ohne eine Meinung über die Art des Hindernisses zu haben. Darüber hinaus schlagen wir zwei neue Methoden vor und bewerten sie in einer eingehenden Ablationsstudie im Vergleich zu mehreren bestehenden Ansätzen, die dem Stand der Technik entsprechen.

«Eine zuverlässige Hinderniserkennung ist wegen der sehr langen Bremswege ein zentrales Thema für die Automatisierung des Zugverkehrs. Cornelius hat einen wichtigen Schritt zur Lösung dieses Problems beigetragen.»Simon Steiner (Leiter Betriebssicherheit SBB AG)
Verbesserte Zustandseinschätzung von Schienenfahrzeugen
Um die globalen Kartendaten und das Wissen über die Position der vorausliegenden Gleise mit den Beobachtungen der Sensoren zu verknüpfen, ist die Kenntnis der aktuellen Position des Fahrzeugs entscheidend. Einzelne Sensormodalitäten sind nicht in der Lage, eine genaue, robuste und hochfrequente Zustandsschätzung zu liefern, so dass ein Ansatz zur Sensorfusion erforderlich ist. Da sich Züge auf genau kartierten Gleisen praktisch in einer Dimension bewegen, stellen wir einen pfadabhängigen Multi-Hypothesen-Kalman-Filter (EKF) vor, der in der Lage ist, absolute und relative Sensormessungen zu fusionieren, um eine genaue Posenschätzung zu erhalten. Wir haben mehrere Datensätze in einer Straßenbahn in der Stadt Zürich aufgezeichnet, um die Genauigkeit und Zuverlässigkeit unserer Methode zu demonstrieren.
Zusammenarbeit
Cornelius führte seine Dissertation über das Projekt durch und fand dieses kollaborative Forschungsprojekt eine interessante und herausfordernde Gelegenheit.

«Es gab zahlreiche Herausforderungen, von der Hardware-Entwicklung über Steuerungssysteme, Kalibrierungsverfahren, Computervision und Deep Learning und vielem mehr. Wir haben jedoch gute Fortschritte gemacht.»Cornelius von Einem (Autonomous Systems Lab, ETH Zürich)
"Besonders einschränkend, und das hat dieses Projekt für alle Beteiligten gezeigt, war der Mangel an öffentlich zugänglichen Eisenbahndatenbeständen. Insbesondere für die Bildverarbeitungskomponenten. Auch hier war die Zusammenarbeit mit Siemens und der SBB von entscheidender Bedeutung. Sie stellten uns Datensätze zur Verfügung und ermöglichten es uns auch, die benötigten Datensätze selbst zu erfassen, was für den Fortschritt dieses Projekts entscheidend war. Mein besonderer Dank gilt Lisa Sidler von der SBB, die uns nicht nur zu Beginn des Projekts bei der Organisation der Datenerfassung geholfen hat. Weitere wichtige Mitarbeiter waren Kristian Weiss von Siemens und Simon Steiner als zweites Teammitglied von der SBB."